Analytische Geometrie Zusammenfassung Abitur
Analytische Geometrie - Themen
Vektoren
Parameterform
Normalenform
Koordinatenform
Punktprobe
Parameterform
Punktprobe
Aufstellen aus
Drei Punkten
Einer Gerade und einem Punkt
Umformen aus anderen Formen
Normalenform
Umformen aus anderen Formen
Koordinatenform
Umformen aus anderen Formen
Spurpunkte
Spurgeraden
Abstandsbestimmung Punkt zu Ebene
Durch Lotgerade
Hessesche Normalenform
Gleichungen
Lagebeziehungen Kugel zu Ebene
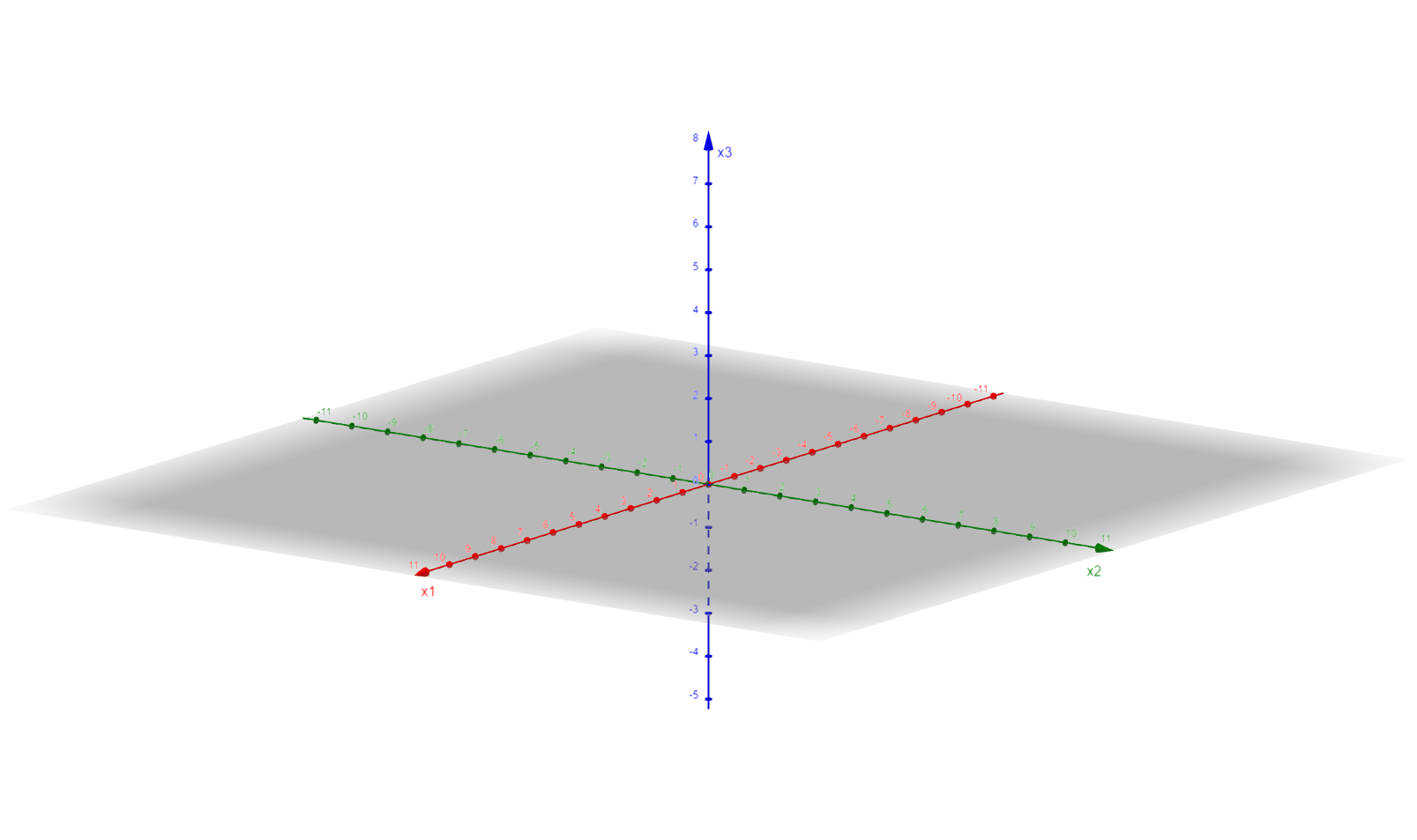
Beschriftung des Koordinatensystems und eines Vierecks
Koordinatensystem
Viereck

Skalarprodukt
Zwei Vektoren stehen senkrecht zueinander (orthogonal), wenn ihr
Skalarprodukt null ergibt, da gilt:
.
Kreuzprodukt
Das Kreuzprodukt lässt sich nach folgendem Schema berechnen. Der resultierende Vektor ist senkrecht zu den beiden ursprünglichen.

Geometrische Bedeutung

Länge von Vektoren
Die Länge ist die Wurzel der Summe aller quadrierten Komponenten.
Einheitsvektor
Vektor mit der gleichen Richtung des ursprünglichen Vektors und der
Länge eins.
Gauß-Verfahren
Der Gauß-Algorithmus wird dazu verwendet, lineare Gleichungssysteme zu lösen.
Dies wird anhand eines Beispiels erklärt:
Es sind folgende Gleichungen gegeben:
Nun werden die Gleichungen ohne die Variablen notiert:
Ziel ist eine stufenförmige Anordnung der Nullen nach diesem oder einem ähnlichen Muster:
Hierdurch kann dann von unten aufgelöst werden. Um dies zu erreichen, können mehrere Operationen angewendet werden:
Zeilen vertauschen
Eine Zeile durch die Summe von ihr und einer anderen Zeile ersetzen
Zeilen mit einer Zahl (ungleich 0) multiplizieren
Für das Beispiel ergibt sich:
2. Zeile durch die Summe der ersten und zweiten Zeile ersetzen
3. Zeile durch Summe der 3. und 2. Zeile ersetzen
Auflösen der letzten Zeile
Auflösen der zweiten Zeile durch das Ergebnis der 3.
1. Zeile durch die Ergebnisse der 2. und 3.
Geraden - Formen und Punktprobe
Parameterform
Über diese Gleichung sind alle Punkte auf der Geraden definiert, sie sind vom Ortsvektor aus über den Richtungsvektor zu erreichen.
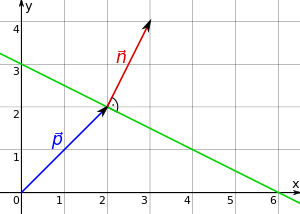
Normalenform
Eine Gerade im zweidimensionalen Raum kann durch die Normalenform bestimmt werden. Sie kann durch einen Stützvektor , welcher der Ortsvektor eines auf der Gerade liegenden Punktes ist und den Normalenvektor , welcher mit der Gerade einen rechten Winkel bildet, dargestellt werden.
Ein Punkt für dessen Ortsvektor gilt, liegt auf der Gerade.
Berechnung aus der Parameterform
Der Stützvektor bleibt gleich. Für den Normalenvektor werden die Komponenten des Richtungsvektors und bei einer Komponente das Vorzeichen vertauscht.
Koordinatenform
Im zweidimensionalen Raum kann eine Gerade auch durch die Koordinatenform beziehungsweise als lineare Gleichung durch drei reelle Zahlen beschrieben werden.
Diese Form entsteht durch ausmultiplizieren der Normalenform.
Punktprobe
Punkt mit Geradengleichung gleichsetzen, t berechnen (muss für jede ,,Zeile“ gleich sein).
[i] Quartl, Line equation qtl3, CC BY-SA 3.0
Lagebeziehungen zweier Geraden zueinander
Parallel
Richtungsvektoren sind Vielfache
Identisch
Richtungsvektoren sind Vielfache & Geraden teilen alle Punkte
Schnittpunkt
Geradengleichungen gleichsetzen und auflösen
Windschief
Die Geraden verlaufen weder parallel noch schneiden sie sich, beim Gleichsetzen der Geradengleichung gibt es keine Lösung und die Richtungsvektoren sind keine Vielfache → siehe Abstandsbestimmung bei Geraden
Ebenen - Gleichungsformen, Umwandlungen, Spurgeraden und Punke
Die Ebene ist ein unbegrenzt ausgedehntes zweidimensionales Objekt.
Parametergleichung
Die Ebene kann durch die Parametergleichung ausgedrückt werden, welche diese Form besitzt:
Erstellen aus drei Punkten
Einer der Punkte wird als Stützvektor genommen, die Spannvektoren sind die Vektoren, welche vom Stützvektor aus zu jeweils einem anderen Punkten führen.
Erstellen aus einer Gerade und einem Punkt
Der Punkt darf nicht auf der Geraden liegen, der Stützvektor und der Richtungsvektor als ein Spannvektor werden übernommen, der zweite Spannvektor ist der vom Stützvektor zum Punkt führende Vektor.
Punktprobe
Gleichsetzten des Punktes mit der Ebenengleichung und auflösen.
Normalenform
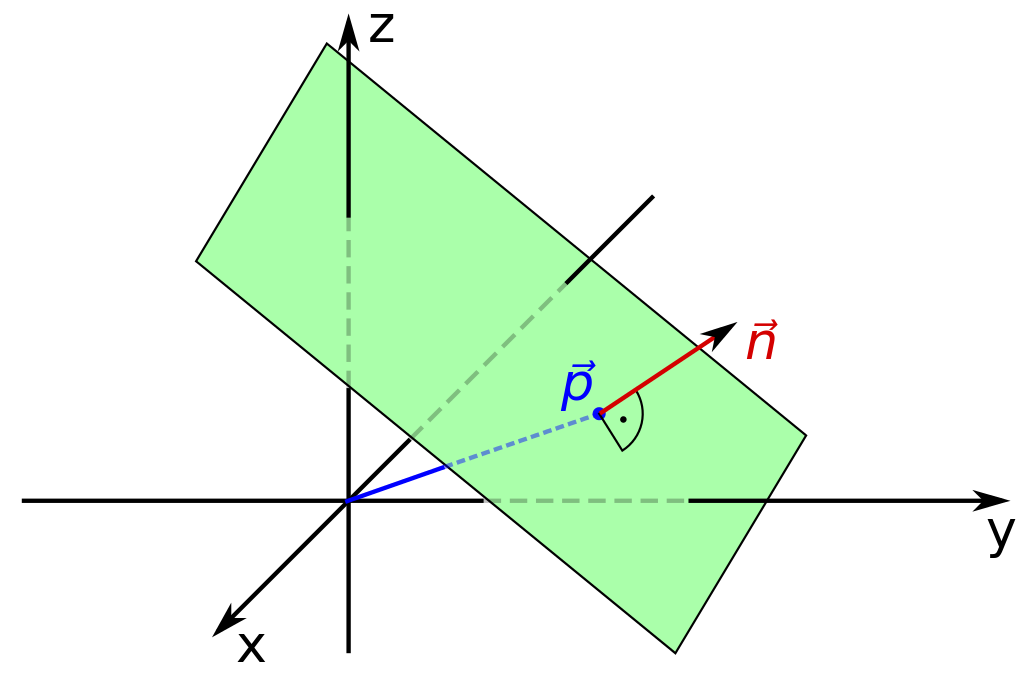
Lizenzhinweis: Quartl, Plane equation qtl3, CC BY-SA 3.0
Berechnung aus der Parameterform
Koordinatenform
Die Ebene kann durch vier reelle Zahlen beschrieben werden.
Diese Form ist die ausmultiplizierte Normalenform.
Spurpunkte
Die Spurpunkte sind solche Punkte, an welchen die Ebene eine Achse schneidet. Hier ist der Wert aller Koordinaten, außer der der Achse, welche geschnitten wird, gleich 0. Für die -Achse setzt man so und gleich 0 und berechnet den Wert für . So ergeben sich maximal drei Spurpunkte. Fehlt ein Spurpunkt, so herrscht Parallelität zu dieser Achse.
Spurgeraden
Die Spurpunkte werden von den Spurgeraden verbunden. Diese sind die Schnittgeraden einer Ebene mit einer Grundebene des räumlichen Koordinatensystems.
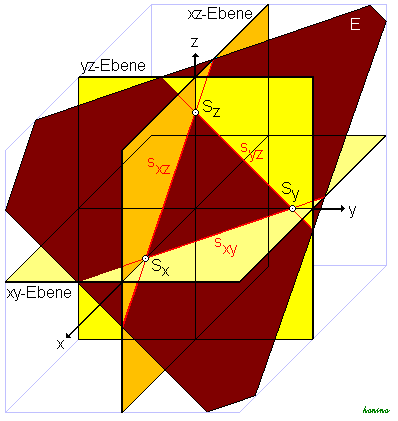
Lizenzhinweis: Honina, Spurgeraden und Punkte, CC BY-SA 3.0
Von der Koordinatenform zur Parameterform
Aus den Spurpunkten kann die Parameterform erstellt werden.
Von der Koordinatenform zur Normalenform
Über a, b und c kann der Normalenvektor bestimmt werden. Zur Bestimmung eines Stützvektors werden zwei Komponente des -Vektors beliebig festgelegt und die dritte durch Einsetzten bestimmt.
Gegenseitige Lage von Ebenen
Für zwei Ebenen gibt es drei mögliche Lagebeziehungen:
Sie sind identisch
Sie sind parallel
Sie schneiden sich in einer Schnittgerade
Um festzustellen, welche Lagebeziehung vorliegt, gibt es mehrere Verfahren.
Beide Ebenen liegen in der Koordinaten- oder Normalenform vor
1. Sind die Normalenvektoren parallel, sind die Ebenen entweder parallel oder identisch.
Gegeben sind und . Folglich sind die Normalenvektoren und . Die Normalenvektoren sind vielfach voneinander, sie sind parallel.
2. Um zu prüfen, ob die Ebenen identisch sind, wird ein beliebiger Punkt aus der einen in die andere Ebene eingesetzt (identische Ebenen teilen alle Punkte). Um einen beliebigen Punkt zu erhalten, werden in der Koordinatenform x1 und x2 beliebig gesetzt und x3 berechnet.
Eingesetzt in F: . Die Ebenen sind parallel und nicht identisch.
3. Sind die Normalenvektoren nicht parallel, gibt es eine Schnittgerade. Diese kann wie folgt berechnet werden.
a. Stufensystem aufstellen
Ich ersetze die 2. Zeile durch die Summe von ihr und der ersten Zeile Mal -1.
b. Eine Variable, welche in beiden Gleichungen vorkommt, gleich t setzen und zu den Variablen auflösen
c. In Geradengleichung umstellen
Eine Ebene liegt in der Parametergleichung, die andere in der Koordinatengleichung vor
Gegeben sind und .
Jede der Zeilen in der Parametergleichung steht für eine Komponente des Vektors x. Die erste Zeile steht für x1 usw..
1. Die Zeilen der Parametergleichung werden in die Koordinatengleichung eingesetzt
Beim Auflösen können drei Möglichkeiten auftreten:
a. Eine wahre Aussage ergibt sich (z. B. 4=4) → identisch
b. Eine falsche Aussage ergibt sich (z. B. 1=5) → parallel
c. r &/ s bleiben bestehen → Schnittgerade
Fall 3. ist hier eingetreten.
2. Das Ergebnis wird beim 3. Fall in die Parametergleichung eingesetzt, um die Gleichung der Schnittgerade herauszufinden.
Beide Ebenen liegen in Parameterform vor
Zwei Ebenen in Parameterform sind gegeben. Ziel ist, für eine der beiden Ebenen einen der Vorfaktoren in Abhängigkeit des anderen auszudrücken.
Für das Beispiel bedeutet dies, dass eine Relation zwischen r und s oder u und t gesucht ist.
1. Ein lineares Gleichungssystem wird hierzu aufgestellt, wobei darauf zu achten ist, nicht die gleichen Symbole für den Vorfaktor der Spannvektoren zu nehmen (nicht zweimal r/s)
a. Die Ebenen in Parameterform werden gleichgesetzt
b. Die Gleichungen werden so umgestellt, dass die Vektoren ohne Variable auf der einen und die mit auf der anderen Seite stehen
c. Ein LGS nach dem Gauß-Verfahren wird aufgestellt und in eine Stufenform gelöst
d. Die letzte Zeile wird herausgeschrieben
In der letzten Zeile können drei Fälle auftreten
Eine wahre Aussage ergibt sich ((alle Variablen fallen weg)0=0) → identisch
Es gibt keine Lösung ((alle Variablen fallen weg)→ 0=7) → parallel
Zwei Variablen lassen sich in Abhängigkeit zueinander stellen → Schnittgerade
2. Tritt der dritte Fall ein, kann eine Schnittgerade berechnet werden. Hierfür wird das Ergebnis so eingesetzt, dass in der gewählten vorherigen Ebenengleichung nur eine Variable übrigbleibt.
Gegenseitige Lage von Geraden und Ebenen
Ebenen und Geraden können auf drei verschiedene Weisen zueinander liegen:
Die Gerade verläuft in der Ebene
Die Gerade schneidet die Ebene
Die Gerade liegt parallel zur Ebene
Welcher Fall vorliegt kann durch verschiedene Verfahren bestimmt werden.
Bestimmung der Lage durch ein lineares Gleichungssystem
Für diese Methode muss die Ebene in der Koordinaten- und die Geraden in der Parameterform vorliegen. Ist dies nicht der Fall müssen die Formen durch Umwandlungen erreicht werden.
Das Verfahren wird an Hand eines Beispiels erklärt:
Gleichung der Ebene in Koordinatenform:
Gleichung der Gerade in Parameterform:
1. Die Geradengleichung wird in die einzelnen Komponenten geteilt
2. Die Komponenten werden in die Koordinatenform der Ebene eingesetzt
3. Es wird nach t aufgelöst
Hier können drei Möglichkeiten auftreten:
t kann bestimmt werden → Schnittpunkt
eine wahre Aussage ist das Ergebnis (z. B. 4=4) → Alle Punkte der Gerade liegen in der Ebene → Die Gerade verläuft in der Ebene
es gibt keine Lösung (z.B. 0=4) → die Gerade verläuft parallel zur Ebene
4. Gibt es einen Schnittpunkt wird dieser durch das Einsetzen des Wertes für t in die Geradengleichung bestimmt
Bestimmung der Lage durch Untersuchung von Vektoren
Gegebene Formen
1. Schnittpunkt / nicht
Ob es einen Schnittpunkt / nicht gibt, kann über den Normalenvektor der Ebene und den Richtungsvektor der Gerade bestimmt werden. Der Normalenvektor steht senkrecht zur Ebene. Steht der Richtungsvektor der Gerade orthogonal zum Normalenvektor, verläuft die Gerade parallel zur oder in der Ebene. Ist dies nicht der Fall gibt es einen Schnittpunkt.
a. Normalenvektor aufstellen
b. Über das Skalarprodukt auf Orthogonalität prüfen
Die Vektoren sind nicht Orthogonal, es gibt einen Schnittpunkt.
c. Bei Orthogonalität einen beliebigen Punkt der Gerade (z. B. Ortsvektor) in die Koordinatenform der Ebene einsetzen. Befindet sich dieser in der Ebene, liegt die Gerade in der Ebene, wenn nicht verläuft die Gerade parallel.
Abstandsbestimmung Punkt zu Ebene
Lotgerade
Der Normalenvektor einer Ebene steht senkrecht zu ihr. Der gesuchte kürzeste Abstand zwischen einem Punkt und einer Ebene wird durch eine senkrecht auf der Ebene stehenden Gerade zum Punkt erreicht. Um den Abstand zu bestimmen geht man wie folgt vor:
1. Eine Geradengleichung mit dem Punkt als Ortsvektor und dem Normalenvektor der Gerade als Richtungsvektor aufstellen
2. Den Schnittpunkt der Gerade mit der Ebene bestimmen (siehe Merkzettel)
3. Den Vektor, welcher vom gegebenen Punkt zum Schnittpunkt führt bestimmen
4. Die Länge dieses Vektors über den Satz des Pythagoras berechnen
Hessesche Normalenform
Um von der Normalenform auf die Hessesche Normalenform zu kommen, wird der Normalenvektor durch dessen Einheitsvektor vertauscht.
Normalenform
Hessesche Normalenform
Abstand vom Punkt zur Ebene mit der Hesseschen Normalenform
Methode 1: Einsetzen in die Hessesche Normalenform
Für x wird der Punkt zu welchem der Abstand berechnet wird eingesetzt. Die Betragsstriche existieren, da die Entfernung nicht negativ sein kann.
Methode 2: Abstand, falls die Ebene in Koordinatenform vorliegt
Man setzt den Punkt in die nach 0 umgestellte Koordinatenform ein und teilt durch die Länge des Normalenvektors.
Herleitung

Zudem ist die geometrische Definition des Skalarprodukts:
Übertragen auf die Zeichnung bedeutet dies:
Nun werden die Gleichungen für den Cosinus gleichgesetzt:
Der Betrag von AP kann herausgekürzt werden
ist der Vektor welcher von A zu P führt, wobei ich a durch p und P durch x ersetze:
ist der Einheitsvektor des Normalenvektors, also
Es ergibt sich die Hessesche Normalenform, wobei zur Bestimmung des Abstandes der gegebene Punkt für x eingesetzt wird.
Abstand Punkt zu Gerade
Vom Punkt ausgehende Ebene mit Richtungsvektor der Gerade als Normalenvektor bilden
Schnittpunkt der Gerade mit der gebildeten Ebene bestimmen
Entfernung des Schnittpunktes und des Punktes bestimmen
Abstand Gerade zu Gerade
Parallele Geraden
Verlaufen die Geraden parallel, so kann ein beliebiger Punkt auf einer der Geraden gewählt werden und nach ,,Abstand Punkt zu Gerade“ der Abstand bestimmt werden.
Windschiefe Geraden
Bei windschiefen Geraden muss eine Hilfsebene von einem Punkt auf einer der Geraden aus konstruiert werden. Die Stützvektoren der Ebene sind die Richtungsvektoren der Geraden, um von der einen Gerade aus eine Ebene zu erzeugen, die parallel zur anderen Gerade liegt und somit einen festen Abstand zu dieser hat. Daraufhin wird dann einfach ein Punkt, welcher auf der parallel zur Ebene laufenden Gerade liegt, in die Hessesche Normalenform der konstruierten Ebene eingesetzt.
Aus dem Text ergibt sich folgenden für die Geraden und .
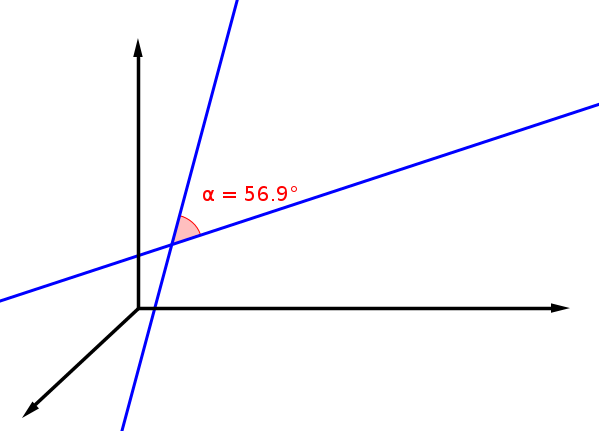
Schnittwinkel in der analytischen Geometrie
Schnittwinkel zweier Geraden
Wiederholung der Gerade-Gerade Lagebeziehungen
Identisch → Richtungsvektoren vielfache && erfüllte Punktprobe für alle Punkte
Parallel → nur Richtungsvektoren vielfache
Schnittpunkt → Gleichsetzen, Auflösen, Schnittpunkt ermittelbar, nicht gleich
Windschief → kein Schnittpunkt, nicht parallel
Quelle: Serlo
Hierbei sind u und v die Richtungsvektoren der Geraden.
Dies lässt sich vereinfacht aus der Definition des Skalarprodukts herleiten:
Das Skalarprodukt ist definiert als:
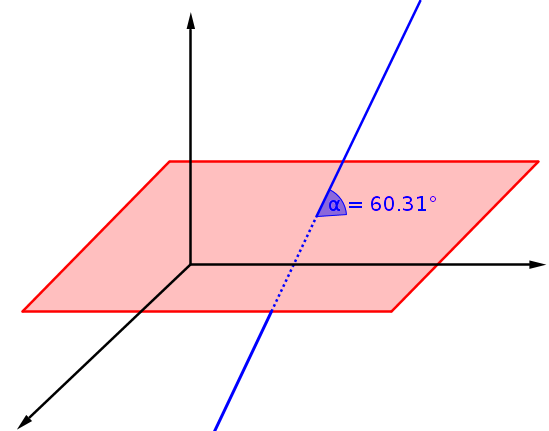
Schnittwinkel zwischen Ebene und Gerade
Schneidet eine Gerade eine Ebene in einem Schnittpunkt (siehe: Gegenseitige Lage von Geraden und Ebenen), so lässt sich auch hier der Schnittwinkel berechnen.
Quelle: Serlo
Hierbei ist n der Normalenvektor der Ebene und u der Richtungsvektor der Gerade.
Herleitung: Der Schnittwinkel zwischen der Ebene und der Gerade ist 90° minus der Schnittwinkel aus Normale der Ebene und Gerade. Daher gilt nach der obigen Herleitung:
,
beziehungsweise
.
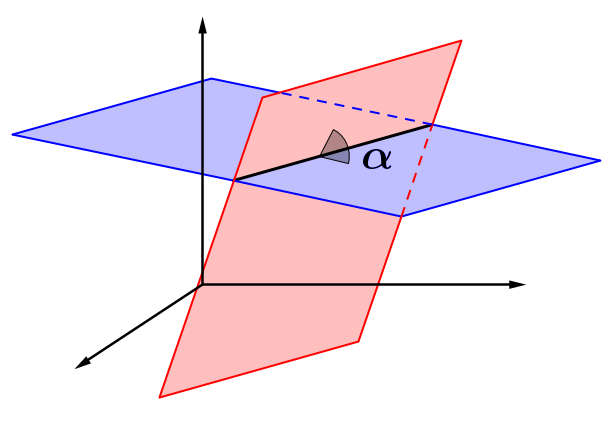
Schnittwinkel zweier Ebenen
Quelle: Serlo
Ebenen können sich in einer Schnittgeraden schneiden. Da die Normalen einen festen Winkel zu ihrer Ebene besitzen (90°), entspricht ihr Schnittwinkel (der der Normalen der Ebenen) dem der Ebenen. Somit gilt:
,
wobei n und m die Normalenvektoren der Ebenen sind.
Kreise und Kugeln in der analytischen Geometrie
Gleichungen
Kreis
Alle Punkte im zweidimensionalen Raum, deren Vektoren zum Mittelpunkt die Länge des Radius haben, liegen auf dem Kreis. Umgeschrieben ergibt sich:
Kugel
Im dreidimensionalen Raum legt die Form nach dem gleichen Prinzip wie bei dem Kreis eine Kugel fest. Es ergibt sich:
Für die Lage eines in die Gleichung eingesetzten Punktes zur Kugel ergeben sich drei Möglichkeiten:
Auf der Kugel -> die Gleichung ist erfüllt
In der Kugel -> das Ergebnis ist zu klein
Außerhalb der Kugel -> das Ergebnis ist zu groß
Falls die Gleichung für die Kugel nicht in der hier aufgeführten Form vorliegt, so kann durch quadratische Ergänzung zu dieser gelangt werden.
Lagebeziehungen
Für die Lagebeziehungen werden meist die Abstände und Radien der Objekte betrachtet.
Kugel zur Ebene
Hier gibt es drei Fälle:
Schnittkreis
Tangentialebene (Berührung in einem Punkt)
Kein Schnittpunkt
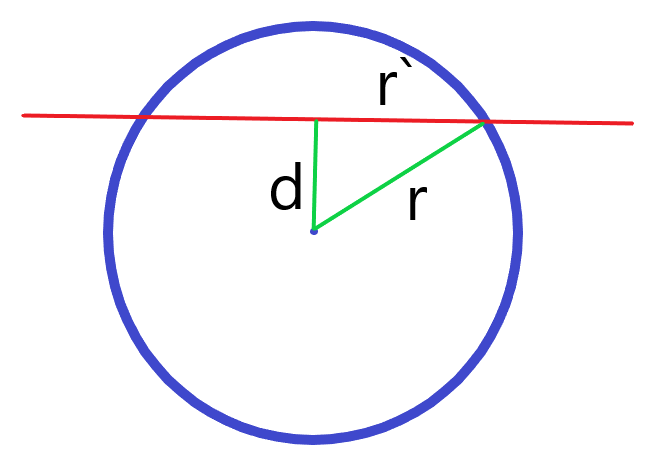
Hierzu wird der kürzeste Abstand d vom Mittelpunkt der Kugel zu der Ebene berechnet und mit dem Radius verglichen. Für die Fälle gilt:
1. Der Punkt auf der Ebene mit dem kürzesten Abstand zum Mittelpunkt des Kreises ist der Mittelpunkt des Schnittkreises. Zum Bestimmen kann der Normalenvektor der Ebene als Einheitsvektor mit dem Abstand (herausgefunden durch die Hessesche Normalenform der Ebene) multipliziert auf den Mittelpunkt addiert werden. Der Radius des Schnittkreises wird über den Satz des Pythagoras bestimmt.
{kind=link}
{kind=link}
{kind=link}
Quelle: unsicher (evtl. aus dem Internet, allerdings nicht erneut über die Bildersuche etc. gefunden)
Aus der Skizze ergibt sich: . Hieraus folgt für den Radius des Schnittkreises:
2.
3.
Kugel zu Gerade
Die Parametergleichung der Geraden wird in die Kugelgleichung eingesetzt.
Keine Lösung → kein gemeinsamer Punkt
Eine Lösung → Gerade berührt Kugel
Zwei Lösungen → Gerade schneidet Kugel
Bilden einer Tangentialebene
Ist ein Punkt auf der Kugel gegeben, so lässt sich mit Hilfe dieses eine Tangentialebene zur Kugel bilden. Der Vektor vom Mittelpunkt der Kugel zum gegebenen Punkt stellt hierbei den Normalenvektor und der gegebene Punkt den Stützvektor dar.
Polarebene
Die Berührpunkte aller Tangenten von einem Punkt außerhalb der Kugel an die Kugel bilden einen Kreis beziehungsweise eine Polarebene. Es gilt:
Sie möchten mir einen Kaffee spendieren?
Anmerkungen oder sonstige Ideen und Vorschläge können Sie gern per Mail an info@lernzettel.org bzw. fehler@lernzettel.org senden.